

ತತ್ವಸ್ಕ್ರೂ ಸ್ಟೆಪ್ಪರ್ ಮೋಟಾರ್: ಸ್ಕ್ರೂ ಮತ್ತು ನಟ್ ಅನ್ನು ತೊಡಗಿಸಿಕೊಳ್ಳಲು ಬಳಸಲಾಗುತ್ತದೆ, ಮತ್ತು ಸ್ಕ್ರೂ ಮತ್ತು ನಟ್ ಪರಸ್ಪರ ಸಾಪೇಕ್ಷವಾಗಿ ತಿರುಗುವುದನ್ನು ತಡೆಯಲು ಸ್ಥಿರವಾದ ನಟ್ ಅನ್ನು ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ, ಹೀಗಾಗಿ ಸ್ಕ್ರೂ ಅಕ್ಷೀಯವಾಗಿ ಚಲಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ. ಸಾಮಾನ್ಯವಾಗಿ, ಈ ರೂಪಾಂತರವನ್ನು ಅರಿತುಕೊಳ್ಳಲು ಎರಡು ಮಾರ್ಗಗಳಿವೆ.
ಮೊದಲನೆಯದು ಮೋಟಾರ್ ಒಳಗೆ ಆಂತರಿಕ ಎಳೆಗಳನ್ನು ಹೊಂದಿರುವ ರೋಟರ್ ಅನ್ನು ನಿರ್ಮಿಸುವುದು ಮತ್ತು ಅದನ್ನು ಅರಿತುಕೊಳ್ಳುವುದುರೇಖೀಯ ಚಲನೆರೋಟರ್ನ ಆಂತರಿಕ ಎಳೆಗಳನ್ನು ಮತ್ತು ಸ್ಕ್ರೂ ಅನ್ನು ತೊಡಗಿಸಿಕೊಳ್ಳುವ ಮೂಲಕ, ಇದನ್ನು ಪೆನೆಟ್ರೇಟಿಂಗ್ ಸ್ಕ್ರೂ ಸ್ಟೆಪ್ಪಿಂಗ್ ಮೋಟಾರ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ. (ನಟ್ ಅನ್ನು ಮೋಟಾರ್ ರೋಟರ್ನೊಂದಿಗೆ ಸಂಯೋಜಿಸಲಾಗಿದೆ ಮತ್ತು ಸ್ಕ್ರೂ ಶಾಫ್ಟ್ ಮೋಟಾರ್ ರೋಟರ್ನ ಮಧ್ಯಭಾಗದ ಮೂಲಕ ಹಾದುಹೋಗುತ್ತದೆ. ಬಳಕೆಯಲ್ಲಿರುವಾಗ, ಸ್ಕ್ರೂ ಅನ್ನು ಸರಿಪಡಿಸಿ ಮತ್ತು ಆಂಟಿ-ರೊಟೇಶನ್ ಮಾಡಿ, ಮೋಟಾರ್ ಅನ್ನು ಆನ್ ಮಾಡಿದಾಗ ಮತ್ತು ರೋಟರ್ ತಿರುಗಿದಾಗ, ಮೋಟಾರ್ ಸ್ಕ್ರೂ ಉದ್ದಕ್ಕೂ ರೇಖೀಯವಾಗಿ ಚಲಿಸುತ್ತದೆ. (ಇದಕ್ಕೆ ವಿರುದ್ಧವಾಗಿ, ಸ್ಕ್ರೂ ಅನ್ನು ಆಂಟಿ-ರೊಟೇಶನ್ ಆಗಿ ಮಾಡುವಾಗ ಮೋಟಾರ್ ಅನ್ನು ಸರಿಪಡಿಸಿದರೆ, ಸ್ಕ್ರೂ ರೇಖೀಯ ಚಲನೆಯನ್ನು ಮಾಡುತ್ತದೆ)
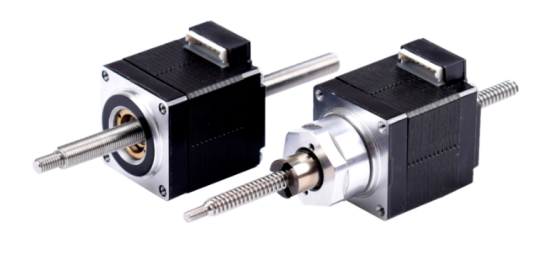
ಅಕ್ಷದ ಮೂಲಕ ಪ್ರಕಾರ
ಎರಡನೆಯದು ತೆಗೆದುಕೊಳ್ಳುವುದುತಿರುಪುಮೋಟಾರ್ ಔಟ್ ಶಾಫ್ಟ್ ಆಗಿ, ಮೋಟಾರ್ ಎಕ್ಸ್ಟರ್ನಲ್ನಲ್ಲಿ ಬಾಹ್ಯ ಡ್ರೈವ್ ನಟ್ ಮತ್ತು ಸ್ಕ್ರೂ ಎಂಗೇಜ್ಮೆಂಟ್ ಮೂಲಕ ರೇಖೀಯ ಚಲನೆಯನ್ನು ಅರಿತುಕೊಳ್ಳಲು, ಇದು ಬಾಹ್ಯ ಡ್ರೈವ್ ಪ್ರಕಾರದ ಸ್ಕ್ರೂ ಸ್ಟೆಪ್ಪಿಂಗ್ ಮೋಟಾರ್ ಆಗಿದೆ. ಫಲಿತಾಂಶವು ಹೆಚ್ಚು ಸರಳೀಕೃತ ವಿನ್ಯಾಸವಾಗಿದ್ದು, ಇದು ಅನೇಕ ಅನ್ವಯಿಕೆಗಳಲ್ಲಿ ನಿಖರವಾದ ರೇಖೀಯ ಚಲನೆಯನ್ನು ಬಾಹ್ಯ ಯಾಂತ್ರಿಕ ಸಂಪರ್ಕದ ಸ್ಥಾಪನೆಯಿಲ್ಲದೆ ಸ್ಕ್ರೂ ಸ್ಟೆಪ್ಪರ್ ಮೋಟರ್ನೊಂದಿಗೆ ನೇರವಾಗಿ ನಿರ್ವಹಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ. (ನಟ್ ಮೋಟರ್ಗೆ ಬಾಹ್ಯವಾಗಿದೆ ಮತ್ತು ಡ್ರೈವ್ ಕಾರ್ಯವಿಧಾನಕ್ಕೆ ಜೋಡಿಸಲ್ಪಟ್ಟಿದೆ. ಮೋಟಾರ್ ತಿರುಗಿದಾಗ, ನಟ್ ಸ್ಕ್ರೂ ಉದ್ದಕ್ಕೂ ರೇಖೀಯವಾಗಿ ಚಲಿಸುತ್ತದೆ.)
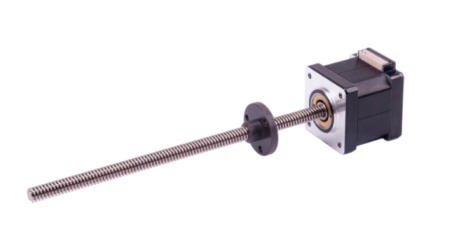
ಬಾಹ್ಯ ಡ್ರೈವ್ ಪ್ರಕಾರ
ಥ್ರೂ-ಆಕ್ಸಿಸ್ ಲೀನಿಯರ್ ಸ್ಟೆಪ್ಪಿಂಗ್ ಮೋಟರ್ನ ಅಪ್ಲಿಕೇಶನ್ ಅನುಕೂಲಗಳು:
ಬಾಹ್ಯವಾಗಿ ಚಾಲಿತ ರೇಖೀಯ ಸ್ಟೆಪ್ಪರ್ ಮೋಟಾರ್ಗಳನ್ನು ಸಂಯೋಗದೊಂದಿಗೆ ಬಳಸುವ ಅಪ್ಲಿಕೇಶನ್ ಸನ್ನಿವೇಶಗಳನ್ನು ಹೋಲಿಸುವುದುರೇಖೀಯ ಮಾರ್ಗದರ್ಶಿ ಮಾರ್ಗಗಳು, ಆಕ್ಸಿಸ್ ಮೂಲಕ ಲೀನಿಯರ್ ಸ್ಟೆಪ್ಪರ್ ಮೋಟಾರ್ಗಳು ತಮ್ಮದೇ ಆದ ವಿಶಿಷ್ಟ ಪ್ರಯೋಜನಗಳನ್ನು ಹೊಂದಿವೆ, ಇವು ಮುಖ್ಯವಾಗಿ ಈ ಕೆಳಗಿನ 3 ಅಂಶಗಳಲ್ಲಿ ಪ್ರತಿಫಲಿಸುತ್ತವೆ:
1.ಹೆಚ್ಚಿನ ಸಿಸ್ಟಮ್ ಅನುಸ್ಥಾಪನಾ ದೋಷವನ್ನು ಅನುಮತಿಸುತ್ತದೆ:
ಸಾಮಾನ್ಯವಾಗಿ, ಬಾಹ್ಯವಾಗಿ ಚಾಲಿತ ಲೀನಿಯರ್ ಸ್ಟೆಪ್ಪರ್ ಮೋಟರ್ ಅನ್ನು ಬಳಸಿದರೆ, ಸ್ಕ್ರೂ ಮತ್ತು ಗೈಡ್ವೇ ಆರೋಹಣದ ನಡುವಿನ ಕಳಪೆ ಸಮಾನಾಂತರತೆಯು ಸಿಸ್ಟಮ್ ಸ್ಥಗಿತಗೊಳ್ಳಲು ಕಾರಣವಾಗಬಹುದು. ಆದಾಗ್ಯೂ, ಥ್ರೂ-ಆಕ್ಸಿಸ್ ಲೀನಿಯರ್ ಸ್ಟೆಪ್ಪರ್ ಮೋಟಾರ್ಗಳೊಂದಿಗೆ, ವಿನ್ಯಾಸದ ರಚನಾತ್ಮಕ ಗುಣಲಕ್ಷಣಗಳಿಂದಾಗಿ ಈ ಮಾರಕ ಸಮಸ್ಯೆಯನ್ನು ಹೆಚ್ಚು ಸುಧಾರಿಸಬಹುದು, ಇದು ಹೆಚ್ಚಿನ ಸಿಸ್ಟಮ್ ದೋಷಕ್ಕೆ ಅವಕಾಶ ನೀಡುತ್ತದೆ.
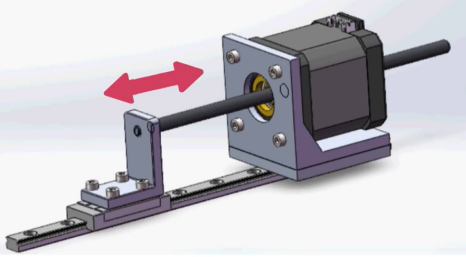
ಮೋಟಾರ್ ಅನ್ನು ಶಕ್ತಿಯುತಗೊಳಿಸಿದಾಗ, ನಟ್ ರೋಟರ್ನೊಂದಿಗೆ ತಿರುಗುತ್ತದೆ ಮತ್ತು ಸ್ಕ್ರೂ ಬಾಹ್ಯ ಲೋಡ್ಗೆ ಸಂಪರ್ಕಗೊಳ್ಳುತ್ತದೆ ಮತ್ತು ಮಾರ್ಗದರ್ಶಿಯ ಉದ್ದಕ್ಕೂ ನೇರ ರೇಖೆಯಲ್ಲಿ ಚಲಿಸುತ್ತದೆ.
2.ಸ್ಕ್ರೂನ ನಿರ್ಣಾಯಕ ವೇಗದಿಂದ ಸೀಮಿತವಾಗಿಲ್ಲ:
ಬಾಹ್ಯವಾಗಿ ಚಾಲಿತ ಲೀನಿಯರ್ ಸ್ಟೆಪ್ಪರ್ ಮೋಟಾರ್ಗಳನ್ನು ಹೆಚ್ಚಿನ ವೇಗದ ರೇಖೀಯ ಚಲನೆಗಾಗಿ ಆಯ್ಕೆ ಮಾಡಿದಾಗ, ಅವು ಸಾಮಾನ್ಯವಾಗಿ ಸ್ಕ್ರೂನ ನಿರ್ಣಾಯಕ ವೇಗದಿಂದ ಸೀಮಿತವಾಗಿರುತ್ತವೆ. ಆದಾಗ್ಯೂ, ಥ್ರೂ-ಆಕ್ಸಿಸ್ ಲೀನಿಯರ್ ಸ್ಟೆಪ್ಪರ್ ಮೋಟಾರ್ನೊಂದಿಗೆ, ಸ್ಕ್ರೂ ಸ್ಥಿರವಾಗಿರುತ್ತದೆ ಮತ್ತು ತಿರುಗುವಿಕೆ-ವಿರೋಧಿಯಾಗಿರುತ್ತದೆ, ಇದು ಮೋಟಾರ್ ರೇಖೀಯ ಮಾರ್ಗದರ್ಶಿ ಮಾರ್ಗದ ಸ್ಲೈಡರ್ ಅನ್ನು ಚಲಾಯಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ. ಸ್ಕ್ರೂ ಸ್ಥಿರವಾಗಿರುವುದರಿಂದ, ಹೆಚ್ಚಿನ ವೇಗವನ್ನು ಅರಿತುಕೊಳ್ಳುವಾಗ ಸ್ಕ್ರೂನ ನಿರ್ಣಾಯಕ ವೇಗದಿಂದ ಅದು ಸೀಮಿತವಾಗಿರುವುದಿಲ್ಲ.
3.ಇದು ಅನುಸ್ಥಾಪನಾ ಸ್ಥಳವನ್ನು ಉಳಿಸುತ್ತದೆ:
ಮೋಟರ್ನಲ್ಲಿ ನಟ್ ಅನ್ನು ನಿರ್ಮಿಸಲಾಗಿರುವ ರಚನಾತ್ಮಕ ವಿನ್ಯಾಸದಿಂದಾಗಿ, ಥ್ರೂ-ಆಕ್ಸಿಸ್ ಲೀನಿಯರ್ ಸ್ಟೆಪ್ಪಿಂಗ್ ಮೋಟರ್ ಸ್ಕ್ರೂನ ಉದ್ದಕ್ಕಿಂತ ಹೆಚ್ಚಿನ ಜಾಗವನ್ನು ತೆಗೆದುಕೊಳ್ಳುವುದಿಲ್ಲ. ಒಂದೇ ಸ್ಕ್ರೂನಲ್ಲಿ ಬಹು ಮೋಟಾರ್ಗಳನ್ನು ಜೋಡಿಸಬಹುದು. ಮೋಟಾರ್ಗಳು ಪರಸ್ಪರ "ಹಾದುಹೋಗಲು" ಸಾಧ್ಯವಿಲ್ಲ, ಆದರೆ ಅವುಗಳ ಚಲನೆಗಳು ಪರಸ್ಪರ ಸ್ವತಂತ್ರವಾಗಿರುತ್ತವೆ. ಆದ್ದರಿಂದ, ಹೆಚ್ಚು ಕಠಿಣ ಸ್ಥಳಾವಕಾಶದ ಅವಶ್ಯಕತೆಗಳನ್ನು ಹೊಂದಿರುವ ಅನ್ವಯಿಕೆಗಳಿಗೆ ಇದು ಸೂಕ್ತವಾದ ಆಯ್ಕೆಯಾಗಿದೆ.
ಹೆಚ್ಚಿನ ಮಾಹಿತಿಗಾಗಿ, ದಯವಿಟ್ಟು ನಮ್ಮನ್ನು ಇಲ್ಲಿ ಸಂಪರ್ಕಿಸಿamanda@kgg-robot.comಅಥವಾ+ವಾಷಿಂಗ್ಟನ್0086 15221578410.
ಪೋಸ್ಟ್ ಸಮಯ: ಫೆಬ್ರವರಿ-11-2025




